




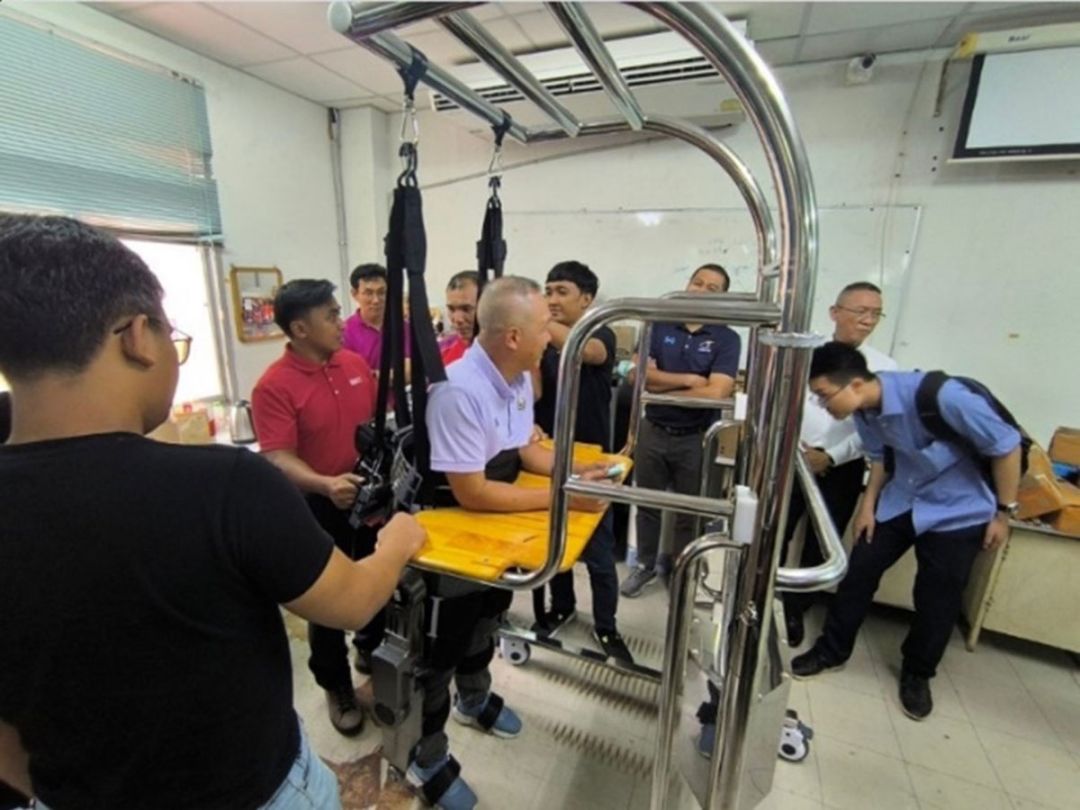
หุ่นยนต์ช่วยเดินเป็นเทคโนโลยีที่มีราคาสูง และนำมาใช้ในโรงพยาบาลใหญ่ๆ เพียงบางแห่งเท่านั้น จึงเป็นเรื่องยากที่บุคคลทั่วไปจะสามารถเข้าถึงได้ บุคลากร 3 สถาบันและบริษัท ประกอบด้วยมหาวิทยาลัยเทคโนโลยีราชมงคลธัญบุรี (มทร.ธัญบุรี) มหาวิทยาลัยราชภัฏสวนสุนันทา โรงพยาบาลพระมงกุฎเกล้า และบริษัท ที ดี เอสเทคโนโลยี (ประเทศไทย) ซึ่งเป็นบริษัทเอกชน โดยได้รับการสนับสนุนงบประมาณหลักๆ จากหน่วยงานบริหารและจัดการทุนด้านการเพิ่มความสามารถในการแข่งขันของประเทศ (บพข) นำโดย รศ.ดร.เดชฤทธิ์ มณีธรรม หัวหน้าสาขาวิศวกรรมเมคคาทรอนิกส์ มหาวิทยาลัยเทคโนโลยีราชมงคลธัญบุรี หัวหน้าโครงการวิจัย รศ.ดร.เบญจลักษณ์เมืองมีศรี คณะวิศวกรรมศาสตร์และเทคโนโลยีอุตสาหกรรม มหาวิทยาลัยราชภัฏสวนสุนันทา พล.ต.ผศ.นพ.อารมย์ ขุนภาษี พล.ต.รศ.นพ.สุธี พานิชกุล จากโรงพยาบาลพระมงกุฎเกล้า และบริษัท ทีดีเอส (ประเทศไทย) จำกัด นอกจากนี้ ยังมีทีมงานผู้ช่วยนักวิจัย Dr.Padma Crisnapati, Dr.Komang Agus Aryanto จากสาขาวิศวกรรมเมคคาทรอนิกส์ คณะครุศาสตร์อุตสาหกรรม มทร.ธัญบุรี ร่วมกันวิจัยและพัฒนาสิ่งประดิษฐ์เพื่อผู้พิการ หุ่นยนต์เสริมพลัง “RMUTT-Exoskeleton Robot” เพื่อให้ผู้ป่วยอัมพาตครึ่งล่าง (Paraplegia) หรืออัมพาตครึ่งซีก (Hemiplegia) สามารถเดินได้โดยมีอุปกรณ์ในการช่วยพยุงเดิน
พล.ต.ผศ.นพ.อารมย์ ขุนภาษีเผยว่า หุ่นยนต์เสริมพลังนี้สามารถช่วยผู้พิการที่ป่วยจากโรคหลอดเลือดสมอง การบาดเจ็บไขสันหลังหรือเส้นประสาท ผู้ป่วยอัมพฤกษ์ อัมพาต ใช้ในการฝึกเดินหรือฝึกกล้ามเนื้อทำให้ร่างกายฟื้นฟูได้เร็วขึ้น และยังสามารถช่วยให้ผู้ป่วยกล้ามเนื้ออ่อนแรงได้ฝึกเดินเหมือนอยู่บนพื้นจริงๆทำให้กล้ามเนื้อบริเวณเอว หลัง และสะโพกมีการฟื้นตัวและมีพัฒนาการที่ดีขึ้น อีกทั้งยังทำให้ผู้ป่วยกลับมามีคุณภาพทางร่างกายและกายภาพที่ดีขึ้น
หัวหน้าโครงการวิจัย รศ.ดร.เดชฤทธิ์ มณีธรรม กล่าวว่าหุ่นยนต์ RMUTT-Exoskeleton Robot ได้ถูกพัฒนามาอย่างต่อเนื่อง โดยในครั้งนี้ได้พัฒนาให้ใช้งานได้จริง โดยพัฒนามา 2 แบบ คือ หุ่นยนต์อัมพาตครึ่งล่าง (Paraplegia) และหุ่นยนต์อัมพาตครึ่งซีก (Hemiplegia)โดยมีการพัฒนาผลงาน คือ การสร้างแบบจำลองโดย Simulink ใน MATLABเช่น การควบคุมมอเตอร์ การตรวจจับการเคลื่อนไหวของเซ็นเซอร์ และการประมวลผลข้อมูลจากปัญญาประดิษฐ์ (AI) เพิ่ม Simulink Blocks ที่จำเป็น เช่น Joint Actuators Sensors และ Controllers เพื่อควบคุมการเคลื่อนไหวของข้อต่อสะโพก เข่า และข้อเท้า โดยระบบควบคุมการเคลื่อนที่ จะประกอบไปด้วย ท่านั่ง ท่ายืน ท่าเดินท่าหยุด ตามลำดับ การออกแบบระบบควบคุม (Control System Design) สำหรับการเคลื่อนไหวของหุ่นยนต์โดยใช้ PID Control (Proportional-Integral-Derivative Control) เพื่อควบคุมมุมการเคลื่อนไหวของข้อต่อแต่ละจุด เช่น ควบคุมการหมุนของข้อต่อสะโพกเพื่อให้ขาก้าวเดินไปข้างหน้า เพิ่ม Adaptive Control เพื่อให้หุ่นยนต์สามารถปรับตัวตามสภาพร่างกายของผู้ป่วย และสามารถเคลื่อนไหวตามวงรอบการเดินของมนุษย์ (Gait Analysis)
ทางด้าน รศ.ดร.เบญจลักษณ์เมืองมีศรี กล่าวว่า หุ่นยนต์เสริมพลังนี้โดยเบื้องต้นได้ทำการทดสอบและเก็บข้อมูลกับกลุ่มทหารที่ได้รับบาดเจ็บจากการปฏิบัติราชการภาคสนาม และประชาชนที่เป็นอัมพาตทั่วไป เพื่อศึกษาและเก็บข้อมูลการใช้งานของหุ่นยนต์เสริมพลัง โดยในอนาคตจะผลิตหุ่นยนต์เสริมพลังสำหรับเด็กที่อัมพาตต่อไป และ พล.ต.รศ.นพ.สุธี พานิชกุล ได้กล่าวเสริมว่า ในอนาคตจะมีการนำไปใช้กับผู้ป่วยราชการสนามที่ได้รับบาดเจ็บและปลดประจำการ ให้ได้ใช้อุปกรณ์นี้เพื่อให้มีคุณภาพชีวิตที่ดีขึ้นต่อไป
หุ่นยนต์เสริมพลัง Exoskeleton Robot ฝีมือคนไทย เป็นอุปกรณ์ในการช่วยพยุงเดิน เสริมพลังช่วย ผู้พิการที่ป่วย ฝีมือคนไทยนักวิจัย 3 สถาบัน และความร่วมมือของบริษัทเอกชน ผนึกกำลังสร้างขึ้น แทนการนำเข้าหุ่นยนต์ช่วยเดินเป็นเทคโนโลยีที่มีราคาสูงผู้สนใจสอบถามรายละเอียดเพิ่มเติมได้ที่ รศ.ดร.เดชฤทธิ์ มณีธรรม โทร.086-8821475
โปรดอ่านก่อนแสดงความคิดเห็น
1.กรุณาใช้ถ้อยคำที่ สุภาพ เหมาะสม ไม่ใช้ ถ้อยคำหยาบคาย ดูหมิ่น ส่อเสียด ให้ร้ายผู้อื่น สร้างความแตกแยกในสังคม งดการใช้ถ้อยคำที่ดูหมิ่นหรือยุยงให้เกลียดชังสถาบันชาติ ศาสนา พระมหากษัตริย์
2.หากพบข้อความที่ไม่เหมาะสม สามารถแจ้งได้ที่อีเมล์ online@naewna.com โดยทีมงานและผู้จัดทำเว็บไซด์ www.naewna.com ขอสงวนสิทธิ์ในการลบความคิดเห็นที่พิจารณาแล้วว่าไม่เหมาะสม โดยไม่ต้องชี้แจงเหตุผลใดๆ ทุกกรณี
3.ขอบเขตความรับผิดชอบของทีมงานและผู้ดำเนินการจัดทำเว็บไซด์ อยู่ที่เนื้อหาข่าวสารที่นำเสนอเท่านั้น หากมีข้อความหรือความคิดเห็นใดที่ขัดต่อข้อ 1 ถือว่าเป็นกระทำนอกเหนือเจตนาของทีมงานและผู้ดำเนินการจัดทำเว็บไซด์ และไม่เป็นเหตุอันต้องรับผิดทางกฎหมายในทุกกรณี
 สกสว.หนุนวิศวกรจิตอาสาร่วมฟื้นฟูเชียงราย มุ่ง ‘เมืองสิ่งแวดล้อมอัจฉริยะ’ รับมือทุกภัยพิบัติ
สกสว.หนุนวิศวกรจิตอาสาร่วมฟื้นฟูเชียงราย มุ่ง ‘เมืองสิ่งแวดล้อมอัจฉริยะ’ รับมือทุกภัยพิบัติ
 อว.หนุนผลิตกำลังคนผ่านหลักสูตรแซนด์บ็อกซ์
อว.หนุนผลิตกำลังคนผ่านหลักสูตรแซนด์บ็อกซ์
 'เฉลิมชัย'เปิดโครงการ'พระแม่พาติว' นำประชาธิปัตย์เป็นผู้'สร้างโอกาส เพิ่มโอกาส ให้โอกาส'
'เฉลิมชัย'เปิดโครงการ'พระแม่พาติว' นำประชาธิปัตย์เป็นผู้'สร้างโอกาส เพิ่มโอกาส ให้โอกาส'
 'จิราพร'ชื่นชม'แจ๊ค บราวน์'อินฟลูเอนเซอร์หนุ่มชาวอังกฤษ เชิญชวนชาวไทย-ต่างชาติร่วมบริจาคโลหิต
'จิราพร'ชื่นชม'แจ๊ค บราวน์'อินฟลูเอนเซอร์หนุ่มชาวอังกฤษ เชิญชวนชาวไทย-ต่างชาติร่วมบริจาคโลหิต
 มมส ชวนวิ่ง ‘แลน-ปัน-ฝัน’ MSU RUNNING 2024 รายได้สมทบซื้ออุปกรณ์ทางการแพทย์
มมส ชวนวิ่ง ‘แลน-ปัน-ฝัน’ MSU RUNNING 2024 รายได้สมทบซื้ออุปกรณ์ทางการแพทย์
 ไทยเปิดฉาก ‘AOSWA 2024’ สร้างศักยภาพด้านการสำรวจสภาพอากาศในอวกาศ
ไทยเปิดฉาก ‘AOSWA 2024’ สร้างศักยภาพด้านการสำรวจสภาพอากาศในอวกาศ



